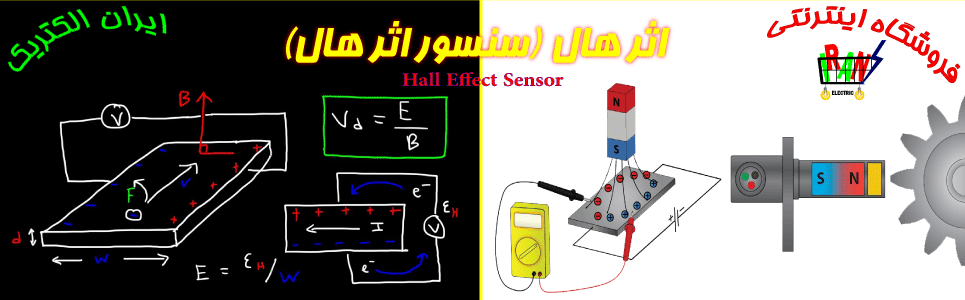
Hall Effect Sensor
مقدمه
اثرهال توسط دکتر ادوین هال (Edwin Hall) درسال ۱۸۷۹ در حالی کشف شد که او دانشجوی دکترای دانشگاه Johns Hopkins در بالتیمر(Baltimore) انگلیس بود. هال درحال تحقیق بر تئوری جریان الکترون کلوین بود که دریافت زمانی که میدان یک آهنربا عمود بر سطح مستطیل نازکی از جنس طلا قرار گیرد که جریانی از آن عبور می کند، اختلاف پتانسیل الکتریکی در لبه های مخالف آن پدید می آید. او دریافت که این ولتاژ متناسب با جریان عبوری از مدار و چگالی شار مغناطیسی عمود بر مدار است. اگر چه آزمایش هال موفقیت آمیز و صحیح بود ولی تا حدود ۷۰ سال پیش از کشف آن کاربردی خارج از قلمرو فیزیک تئوری برای آن بدست نیامد. با ورود مواد نیمه هادی در دهه ۱۹۵۰ اثرهال اولین کاربرد عملی خود را بدست آورد. درسال ۱۹۶۵ Joe Maupin , Everett Vorthman برای تولید یک سنسور حالت جامد کاربردی وکم هزینه از میان ایده های متفاوت اثرهال را انتخاب نمودند. علت این انتخاب جا دادن تمام این سنسور بر روی یک تراشه سیلیکن با هزینه کم و ابعاد کوچک بوده است این کشف مهم ورود اثر هال به دنیای عملی و پروکاربرد خود درجهان بود.

سنسورهای مغناطیسی برای تشخیص میدانهای مغناطیسی در کاربردهای متفاوتی استفاده میشوند. یک نوع از این سنسورها، که در آن سیگنال خروجی، تابعی از چگالی میدان مغناطیسی اطراف آن است، “سنسور اثر هال” (Hall Effect Sensor) نامیده میشود.
سنسور اثر هال دستگاهی است که با اعمال میدان مغناطیسی، فعال میشود. میدانیم میدان مغناطیسی دو مشخصه مهم دارد. یکی چگالی شار مغناطیسی (B) و دیگری قطبیت (قطب شمال و جنوب). سیگنال خروجیِ سنسور اثر هال، تابعی از چگالی میدان مغناطیسی اعمال شده به سنسور است. هنگامی که چگالی شار مغناطیسی اطراف سنسور، از یک آستانه مشخص عبور کند، سنسور این موضوع را تشخیص میدهد و یک ولتاژ خروجی به نام “ولتاژ هال” (Hall Voltage) (VHVH)، تولید میکند.
اصول عملکرد سنسور اثر هال
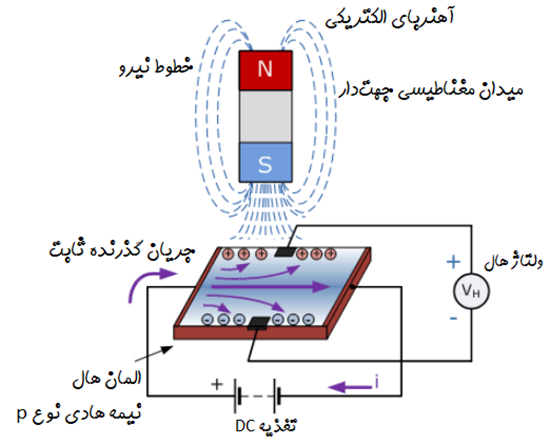
سنسور یا حسگر اثر هال از یک ماده نیمههادی مستطیلی نوع p مانند گالیم آرسناید (Ga As)، ایندیم آنتیمونید (In Sb) یا ایندیم آرسناید (In As) تشکیل شده است. یک جریان به صورت پیوسته از این ماده میگذرد. هنگامی که سنسور، در یک میدان مغناطیسی قرار میگیرد، خطوط شار مغناطیسی، نیرویی به نیمههادی اعمال میکند. این نیرو، باعث جهتگیری حاملهای بار موجود در نیمههادی (یعنی الکترونها و حفرهها) به دو طرف تیغه میشود. حرکت حاملهای بار، نتیجه نیروی مغناطیسی وارد شده به آنها است.
به دلیل تجمع حاملهای بار در دو طرف تیغه، یک اختلاف پتانسیل بین دو طرف نیمه هادی ایجاد میشود. پدیده تولید ولتاژ در دو طرف نیمههادی (ناشی از میدان مغناطیسی)، “اثر هال” (The Hall Effect) نام دارد. اصل فیزیکی که باعث این پدیده میشود نیروی لورنتس است. برای تولید این اختلاف پتانسیل در ماده، خطوط شار مغناطیسی باید بر جهت جریان متعامد و قطبش (پلاریته) آن مناسب باشد. در حالت کلی، قطب جنوب آهنربا باید بر جهت جریان عمود باشد.
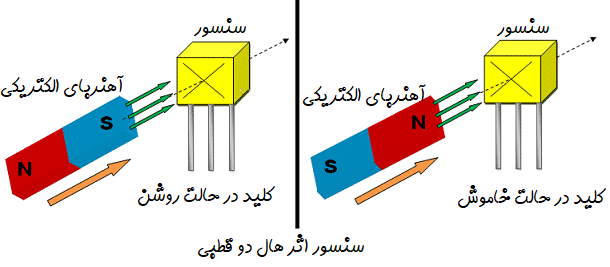
اثر هال به قطب مغناطیسی آهنربا و شدت میدان مغناطیسیِ اعمالی، بستگی دارد. برای مثال، استفاده از قطب جنوب برای فعال کردن سنسور، باعث ایجاد اختلاف ولتاژ میشود. این اختلاف ولتاژ قابل اندازهگیری است. اما استفاده از قطب شمال هیچ اختلاف ولتاژی ایجاد نمیکند (یعنی باعث حرکت حاملهای بار نمیشود). در کل، سنسورها و کلیدهای اثر هال برای حالت «خاموش» (شرایط مدار باز) ساخته میشوند. در این حالت، میدان مغناطیسی وجود ندارد. تنها در حالتی که میدان مغناطیسی به اندازه کافی قوی باشد و پلاریزاسیون آن نیز صحیح باشد، سنسور فعال شده و به اصطلاح کلید به حالت روشن (شرایط مدار بسته) تغییر وضعیت میدهد.
سنسور مغناطیسی اثر هال
ولتاژ خروجی که به نام ولتاژ هال (VHVH) شناخته میشود، با شدت میدان مغناطیسی متعامد بر نیمههادی، رابطه مستقیمی دارد. وقتی این سنسور در معرض میدان مغناطیسی مناسب قرار گیرد، ولتاژ خروجی آن، معمولا از چند میکروولت بیشتر نمیشود. به همین دلیل، اغلب سنسورهای اثر هال برای ارتقای حساسیت سنسور، کم کردن خطای ناشی از تلفات هیسترزیس و گرفتن ولتاژ مطلوب در خروجی، در داخل خود، تقویت کننده داخلی DC، مدارات منطقی برای کلیدزنی و تنظیمکننده ولتاژ دارند. به این صورت میتوان حساسیت سنسور را برای اندازههای مختلف میدان مغناطیسی و شرایط مختلف تغذیه تنظیم کرد.

خروجی سنسور اثر هال میتواند دیجیتال یا خطی باشد. در سنسورهای خطی (آنالوگ)، خروجی سنسور مستقیما به یک تقویتکننده متصل است. سیگنال نیز از خروجی تقویتکننده گرفته میشود. این مسئله در شکل زیر نشان داده شده است.

ولتاژ خروجی در این حالت به صورت مستقیم، با میدان مغناطیسی عبوری از سنسور متناسب است. ولتاژ خروجی هال به صورت زیر داده میشود:
VH=RH(It×B)VH
که در آن:
- VH ولتاژ هال با واحد ولت است.
- RH ضریب اثر هال است.
- I جریان عبوری از سنسور با واحد آمپر است.
- t ضخامت سنسور با واحد میلیمتر است.
- B چگالی شار مغناطیسی با واحد تسلا است.
ولتاژ خروجیِ سنسورهای خطی یا آنالوگ، پیوسته است. این ولتاژ، با افزایش شدت میدان مغناطیسی زیاد میشود. اگر میدان مغناطیسیِ اعمالی کم شود، ولتاژ خروجی کاهش مییابد. در سنسورهای اثر هال خطی یا آنالوگ، هرچه شدت میدان مغناطیسی زیاد شود، خروجی تقویتکننده تا یک نقطه مشخص زیاد میشود و به نقطه اشباع خود میرسد. از این نقطه به بعد، هر افزایشی در میدان مغناطیسی هیچ اثری روی ولتاژ خروجی ندارد. اگر میدان مغناطیسی را افزایش دهیم، سنسور بیشتر به حالت اشباع میرود.

از سوی دیگر، در سنسورهای دیجیتال، از “اشمیت تریگر” (Schmitt trigger) استفاده میشود. اشمیت تریگر یک مدار مقایسهکننده است که از فیدبک مثبت استفاده میکند. اشمیت تریگر، یک مدار فعال است که سیگنال ورودی آنالوگ را به سیگنال خروجی دیجیتال تبدیل میکند. در این مدار، وقتی ولتاژ ورودی از آستانه مشخصی فراتر رود، ولتاژ خروجی، یک ولت خواهد بود. یعنی کلید در وضعیت “روشن” (ON) قرار میگیرد. وقتی ولتاژ ورودی از مقدار آستانه کمتر باشد، ولتاژ خروجی این مدار صفر ولت خواهد بود. یعنی کلید در وضعیت “خاموش” (OFF) قرار میگیرد. هنگامی که این سنسور در معرض میدان مغناطیسی قرار میگیرد یا میدان مغناطیسی حذف میشود، به دلیل وجود مدار اشمیت تریگر، هیچ نوسانی در مدار خروجی سنسور مشاهده نمیشود.

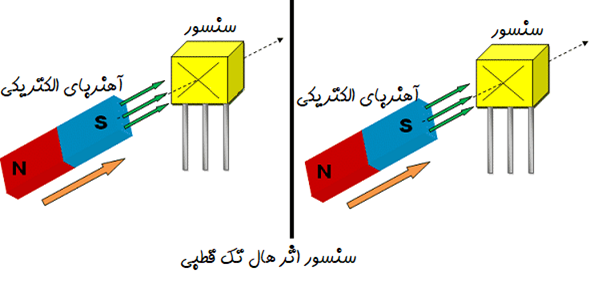
دو نوع اصلی از سنسور اثر هال دیجیتال وجود دارد. یکی “دوقطبی” (Bipolar) و دیگری “تک قطبی” (Unipolar). سنسورهای دیجیتال دوقطبی برای فعال شدن، به میدان مغناطیسی مثبت (قطب جنوب آهنربا) و برای غیر فعال شدن، به میدان مغناطیسی منفی (قطب شمال آهنربا) نیاز دارند. در حالی که سنسورهای تک قطبی، با قرار گرفتن در معرض قطب جنوب آهنربا فعال میشوند. اگر آهنربا را از طرف قطب جنوب از سنسور دور کنیم، سنسور غیرفعال خواهد شد و احتیاجی به قطب شمال آهنربا نیست.
کلیدهایی که با سنسور اثر هال کار میکنند، توانایی کلیدزنی برای داشتن خروجی با جریان الکتریکی بزرگ را ندارند، زیرا توانایی آنها بسیار محدود است. جریان خروجی این مدارها بسیار کوچک و در حدود ۱۰ تا ۲۰ میلی آمپر است. برای داشتن جریانهای الکتریکی بزرگ در خروجی از یک تقویتکننده (یک ترانزیستور NPN با کلکتور باز) استفاده میشود.
این ترانزیستور مثل یک کلید NPN عمل میکند. هرگاه، چگالی شار مغناطیسی اعمالی به سنسور، از مقدار آستانه بالاتر رود، کلید، خروجی را زمین میکند. این ترانزیستور را میتوان به صورت کلکتور باز یا به صورت امیتر باز استفاده کرد. به این ترتیب، یک مدار تقویتکننده پوش – پول داریم. حال میتوان این سنسور را به بارهایی با جریان بالا مانند رله، موتور،LED و لامپ وصل کرد.
کاربردهای سنسور اثر هال
همانطور که بیان شد، سنسور اثر هال با میدان مغناطیسی فعال میشود. در بسیاری از کاربردها، سنسور به همراه یک آهنربای دائم روی یک استوانه متحرک قرار میگیرد. حرکت سنسور و آهنربا نسبت به هم میتواند حالتهای متفاوتی داشته باشد. حالتهای رو به جلو، جانبی (به طرفین)، “پوش – پول” (Push-Pull) و “پوش – پوش” (Push-Push) انواع مختلف حرکت سنسور و آهنربا نسبت به هم هستند. در همه این حالتها، برای آنکه حداکثر حساسیت سنسور تضمین شود، خطوط شار مغناطیسی باید بر سنسور عمود باشند و قطبش آن نیز صحیح باشد (یعنی از قطب جنوب آهنربا برای فعال کردن سنسور استفاده کنیم).
همچنین برای تضمین رفتار خطی سنسور، از آهنربای قوی استفاده میشود. به این صورت با حرکت آهنربا، تغییر شدیدی در شدت میدان مغناطیسی عبوری از سنسور خواهیم داشت. برای تشخیص میدان مغناطیسی، سنسور و آهنربا میتوانند وضعیتهای مختلفی نسبت به هم داشته باشند. دو نوع معمول در سنسورهای اثر هال حرکت رو به جلو و حرکت جانبی است.
حرکت رو به جلو
در این حالت، سنسور اثر هال و میدان مغناطیسی به صورت عمود بر هم قرار میگیرند. برای آنکه سنسور فعال شود، آهنربا به طور مستقیم به سمت سنسور حرکت میکند.

در این حالت، یک سیگنال در خروجی سنسور (VHVH) ایجاد میشود. این ولتاژ در سنسورهای خطی، نشاندهنده آن است که شدت میدان مغناطیسی و چگالی شار مغناطیسی تابعی از فاصله آهنربا از سنسور است. هرچه آهنربا به سنسور نزدیکتر باشد، شدت میدان مغناطیسی بیشتر است. پس ولتاژ خروجی سنسور نیز بزرگتر خواهد بود.
حرکت جانبی
در این حالت، حرکت آهنربا نسبت به سنسور به صورت جانبی است. این وضعیت برای حالتی مناسب است که بخواهیم فاصله بین آهنربا و سنسور را ثابت نگه داریم. مثلا در حالتی که آهنربای چرخشی داریم از این روش برای تشخیص استفاده میشود؛ مانند: تشخیص سرعت چرخش موتور.

خط وسط سنسور اثر هال، نقطه صفر آن به حساب میآید. با حرکت آهنربا به صورت جانبی، ولتاژ خروجی سنسور، میتواند مثبت یا منفی میشود.
سنسورهای اثر هال به طور خاص به عنوان “سنسور مجاورتی” (Proximity sensor) نیز کاربرد دارند. در شرایطی که محیط خاص داریم، مثل مجاورت با آب، گرد و خاک، لرزش یا روغن، از این سنسورها به جای سنسور نوری استفاده میشود. مثال مناسب این محیط خاص، داخل سیستم خودرو است. همچنین سنسور اثر هال را برای اندازهگیری جریان نیز میتوان به کار برد.
میدانیم سنسورهای اثر هال برای تشخیص وجود یا عدم وجود میدان مغناطیسی یا آهنربا به کار میرود. همچنین میتوان از آنها برای تشخیص مواد فرومغناطیس مثل آهن یا فولاد استفاده کرد. برای این کار، یک آهنربای دائم در نزدیکی ناحیه فعال سنسور قرار میگیرد تا سنسور به اصطلاح «بایاس» شود. در این حالت، سنسور در یک میدان مغناطیسی دائم و ساکن قرار میگیرد. حال اگر یک قطعه آهنی در کنار سنسور قرار دهیم، میدان مغناطیسی برخورد کننده به سنسور، دچار تغییر و اختلال میشود و سنسور وجود این قطعه آهنی را تشخیص میدهد. حساسیت سنسور را میتوان حتی تا حدود چند میلیولت نیز بالا برد.
دیود نوری (LED)
یک کاربرد مرسوم از سنسور اثر هال، “دیود نوری ساطعکننده نور یا نور افشان” (Light-Emitting Diode) به اختصار LED است. این کاربرد در شکل زیر نشان داده شده است. وقتی میدان مغناطیسی وجود ندارد (صفر گاوس) کلید در وضعیت «خاموش» است. هنگامی که قطب جنوب آهنربا به صورت عمودی به ناحیه فعال سنسور، نزدیک میشود، کلید در وضعیت «روشن» قرار میگیرد و دیود روشن میشود. در نتیجه، سنسور اثر هال در وضعیت «روشن» باقی میماند.
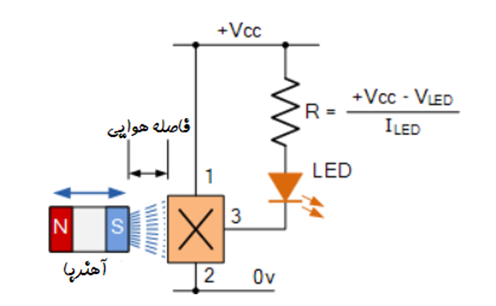
برای خاموش کردن دیود سنسورهای تک قطبی، باید آهنربا را از آن دور کنیم. برای سنسورهای دو قطبی نیز باید قطب شمال آهنربا را در کنار سنسور قرار دهیم. در دستگاههایی که بار الکتریکی بزرگتری دارند و جریان بزرگتری میخواهند، باید از ترانزیستور توان بالا در خروجی سنسور استفاده کنیم.
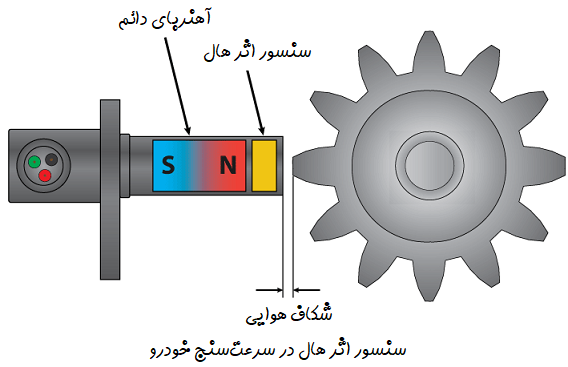
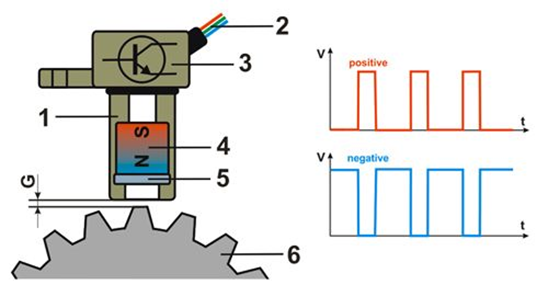
به عنوان مثالی دیگر از این سنسور، میتوان به سرعتسنج خودرو اشاره کرد. این سنسور در کنار یک آهنربای دائم روی یک میله تعبیه شده است. در کنار این میله، یک چرخدنده قرار دارد. شکاف هوایی بین چرخدنده و سنسور هال بسیار کم است. در نتیجه با عبور هریک از دندانهها از نزدیکی سنسور، میدان مغناطیسی اطراف سنسور تغییر میکند. این موضوع باعث میشود سیگنال خروجی سنسور صفر یا یک شود. بنابراین سیگنال خروجی سنسور، یک موج مربعی است. از دوره تناوب این موج مربعی میتوان برای محاسبه سرعت استفاده کرد.
از دیگر کاربردهای این سنسور، استفاده در جویاستیک و “مغناطیسسنج” (Magnetometer) است. در مقایس بزرگتر، از اثر هال برای “پیشرانه اثر هال” (Hall Effect Thruster) استفاده میشود که کاربرد آن در فرستادن فضاپیما به فضا است.
انواع کاربردهای دیگر
کاربردهای حسگر با خروجی دیجیتال:
1-کنترل موتور (تشخیص سرعت) 2-تجهیزات عکاسی (اندازه گیری زمان) 3-زمان احتراق 4-حسگر مکان 5-شمارنده پالس (چاپگر و درایو موتور) 6-حسگرتعیین مکان ساقه شیر 7-قفل شدن در 8-مشاهده جریان (سیستم موتور) 9-اندازه گیری سرعت چرخش10-اندازه گیری فلو 11-رله 12-آشکارسازهای نزدیکی 13-امنیتی (کارتهای مغناطیسی) 14-ماشینهای بانکی (گوینده اتوماتیکی) 15-ارتباطات راه دور 16-فشارسنجها 17-سوییچهای محدود کننده 18-سنسور تعیین مکان لنز 19-تست تجهیزات 20-سنسور تعیین مکان شفت 21-دستگاههای سکهای
کاربردهای سنسور با خروجی خطی :
1-مشاهده جریان 2-درایو دیسک 3-درایو فرکانس متغیر 4-کنترل حفاظت موتور 5-حفاظت منبع تغذیه 6-اندازه گیری مکان 7-دیافراگم فشار 8-پتانسیومترهای غیر تماسی 9-سوییچهای انکودر 10-انکودرهای چرخشی 11-تنظیم کننده ولتاژ 12-ردیاب فلزات آهن دار
*در زیر به توضیح چند یک از کاربردهای ذکر شده در بالا میپردازیم.
بستن در (door interlock ) و زمان احتراق :
در این روش سنسور طوری قرار میگیرد که زمانی که کلید داخل قفل قرار میگیرد باعث میشود میدان مغناطیسی بچرخد. از مزایای این روش یخ، آب و دیگر مشکلاتی که مخالف شرایط طبیعی هستند حذف شدهاند.
این روش همچنین به عنوان قفل الکتریکی میتواند به کار رود.

حسگرRPM :
حسگر RPM یکی ازعمومیترین کاربردها برای حسگر اثر هال است.
شار مغناطیسی مورد نیاز برای عملکرد حسگر میتواند با آهن ربای جدا که بر روی شفت یا چرخ تصب شدهاست یا به وسیله حلقه مغناطیسی تامین شود.
حسگر دما و فشار :
حسگر با خروجی خطی این امکان را میدهد که پارامترهای دیگری به جز مکان و جریان را اندازه گرفت.
زمانی که سنسور خطی با نیروی مغناطیسی ترکیب میشود میتواند برای اندازه گیری دما یا فشار به کار رود.
در اندازه گیری فشار قسمت مغناطیسی به قسمت فانوس(bellows) متصل شدهاست. هنگامی که بلو منبسط یا منقبض میشود قسمت مغناطیسی حرکت میکند. اگر سنسور در نزدیکی قسمت مغناطیسی قرار گرفته باشد ولتاژ خروجی متناسب با فشار ورودی میتوان به دست آورد.
طرز کار اندازه گیری دما نیز مشابه فشار است به غیر از اینکه گازبا انبساط حرارتی مشخصی در قسمت بلو قرار گرفتهاست و هنگامی که محفظه گرم میشود و گاز منبسط میشود و باعث ایجاد ولتاژی که متناسب با دما برای سنسور میکند.
کارت خوان مغناطیسی :
سیستم امنیتی قفل در میتواند با با استفاده از سنسور خروجی خطی ،کارتهای مغناطیسی و مدارات میکروپروسسورهای خطی مانند شکل زیر طراحی شود.
در این مثال با لغزش کارت خروجی سنسور تغییر میکند. این سیگنال آنالوگ به دیجیتال تبدیل میشود تا برای عملکرد رله مناسب باشد. زمانی که پالسی به رلههای سلنوئیدی میرسد در باز میشود.

حسگر اتومبیل:
در شکل زیر بسیاری از جاهایی که حسگر اثر هال میتواند به کار رود مانند مانیتورینگ، تعین مکان یا وسایل فیدبک امنیتی برای صنعت خودروسازی به کار رود.
هر دو سنسور خروجی خطی و دیجیتال در این کاربردها استفاده میشود مانند اندازه گیری فلو حسگر جریان، حسگر مکان، قفل در ، حسگر فشار، حسگرRPM و غیره.


موتور سه فاز براشلس سه فاز بوسیله سنسور اثر هال (BLDC Motor):
موتورهای سه فاز براشلس برای تعیین موقعیت روتور به سه سنسور اثر هال نیاز دارند بر اساس موقعیت فیزیمی سنسور های اثر هال دو تیپ خروجی وجود دارد پرش 60 درجه ای فاز و پرش 120 درجه فاز ترکیب این سه سنسور هال می تواند سکانس های اضافی مربوطه را تعیین کند.

شکل زیر سکانس های متغیر مدار درایور موتور براشلس سه فاز که به طور پاد ساعتگرد در حال چرخش است را نشان می دهد سه سنسور هال a b و c به فواصل 120 درجه روی استاتور قرار داده شده اند به طوریکه سه فاز ( سیم پیچ ها ) به حالت ستاره (Y) به یکدیگر متصل شده اند برای هر دوران 60 درجه یکی از سنسورهای هال تغییر سطح ولتاژ می دهد یک سیکل کامل دارای 6 مرحله می باشد به طور هماهنگ هر 60 درجه سوئیچ جریان فاز با توجه به موقعیت تغییر می کند برای هر مرحله یکی از پایه ها در ولتاژ HIGH و یکی در LOW و سومی به حالت معلق متمایل به LOW قرار دارد.

کنترل درایور های منحصر به فرد هر درایور HIGH و LOW باعث درایو LOW و درایو HIGH و درایو شناور در هر پایه موتور می باشد با این حال ممکن است یک سیکل سیگنال مطابق یک دور کامل مکانیکی موتور نباشد بنابراین تعداد سیکل سیگنال برابر تعداد جفت قطب های روتور می باشد.
با ما همراه باشید…
فروشگاه اینترنتی ایران الکتریک
Iran Electric Shop
لوستر 3 شعله چشمه نور کد A811/3C
قیمت اصلی 2,256,000 تومان بود.1,281,900 تومانقیمت فعلی 1,281,900 تومان است.پروژکتور LED تک خانه 50 وات شراک
499,000 تومانچراغ سردری سپاهان لایت مدل پارسا
700,000 تومانساعت نجومی 6A شیوا امواج
985,000 تومانسینی سقفی چهار شعله برند فانوس
280,000 تومانتردمیل خانگی 3 اسب فلکسی فیت مدل F-39S
برای سفارش تماس بگیریدچراغ پارکی سپاهان لایت مدل اشکان 60 سانتی
833,000 تومانلوستر 12 شعله چشمه نور کد C2171/6+6-BO
جهت استعلام موجودی و قیمت تماس بگیرید!!
- انتخاب گزینهها این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوند
ال ای دی SMD شاخه ای نیم متری
38,000 تومان- انتخاب گزینهها این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوند
چراغ خواب LED بوسه پسر رنگی منیر لایت
180,000 تومان










